
Bilateral_Grid
Bilateral filter
A bilateral filter is a non-linear, edge-preserving, and noise-reducing smoothing filter for images.
This weight can be based on a Gaussian distribution. Crucially, the weights depend not only on Euclidean distance of pixels, but also on the radiometric differences.
-
空间距离:当前点与中心点的欧式距离
-
灰度距离:指的是当前点的灰度与中心点灰度的差的绝对值
2. Bilateral Grid
2.1 edge-aware brush
2.2 Defination
Data Structure
3d array:
- the first 2 dimensions (x, y) correspond to 2D position in the image plane and form the spatial domain
- the third dimension z corresponds to a reference range, typically is image intensity
Samping
- : the sampling rate of spatial axes
- : the sampling rate of the range axis.
The number of grid cells is inversely proportional to the sampling rate: a smaller sampling rate yields a larger number of grid cells
2.3 Basic Usage of a Bilateral Grid
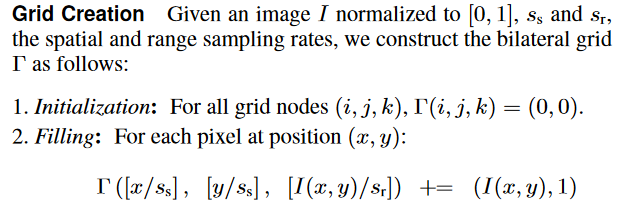
Grid Creation
Slicing
Slicing is the critical bilateral grid operation that yields a piecewise-smooth output.
Given a bilateral grid and a reference image E, we extract a 2D value map M by accessing the grid at
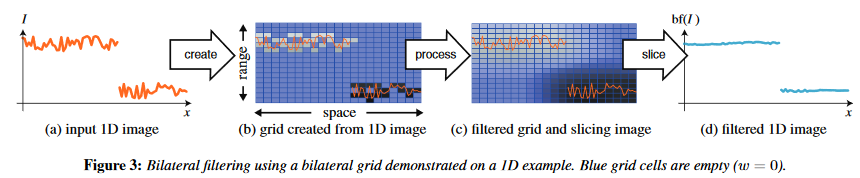
- 上图d就是在process之后取回滤波后的值
- 比如之前有一个像素的位置是,然后就去相应的位置取采样后的值
- 由图©可以看出图像已经平滑过了,而强度相差较大的点因为在三维空间上不连续所以不受影响。
All articles in this blog are licensed under CC BY-NC-SA 4.0 unless stating additionally.
Related Articles
