直接线性变换法
对于一对匹配点 x 1 = [ u 1 , v 1 , 1 ] T , x 2 = [ u 2 , v 2 , 1 ] T x_1=[u_1, v_1, 1]^T, x_2=[u_2, v_2, 1]^T x 1 = [ u 1 , v 1 , 1 ] T , x 2 = [ u 2 , v 2 , 1 ] T x 2 T F x 1 = 0 x_2^TFx_1=0 x 2 T F x 1 = 0
( u 1 v 1 1 ) [ F 11 F 12 F 13 F 21 F 22 F 23 F 31 F 32 F 33 ] ( u 2 v 2 1 ) = 0 \left(\begin{array}{lll}
u_{1} & v_{1} & 1
\end{array}\right)\left[\begin{array}{lll}
F_{11} & F_{12} & F_{13} \\
F_{21} & F_{22} & F_{23} \\
F_{31} & F_{32} & F_{33}
\end{array}\right]\left(\begin{array}{c}
u_{2} \\
v_{2} \\
1
\end{array}\right)=0
( u 1 v 1 1 ) ⎣ ⎡ F 11 F 21 F 31 F 12 F 22 F 32 F 13 F 23 F 33 ⎦ ⎤ ⎝ ⎛ u 2 v 2 1 ⎠ ⎞ = 0
令f = [ F 11 , F 12 , F 13 , F 21 , F 22 , F 21 , F 31 , F 32 , F 31 ] ⊤ \boldsymbol{f}=\left[\begin{array}{lllllllll}
F_{11}, & F_{12}, & F_{13}, & F_{21}, & F_{22}, & F_{21}, & F_{31}, & F_{32}, & F_{31}
\end{array}\right]^{\top} f = [ F 11 , F 12 , F 13 , F 21 , F 22 , F 21 , F 31 , F 32 , F 31 ] ⊤
[ u 1 u 1 , u 1 v 2 , u 1 , v 2 u 1 , v 1 v 2 , v 1 , u 2 , v 2 , 1 ] f = 0 \left[u_{1} u_{1}, \quad u_{1} v_{2}, \quad u_{1}, \quad v_{2} u_{1}, \quad v_{1} v_{2}, \quad v_{1}, \quad u_{2}, \quad v_{2}, \quad 1\right] f=0
[ u 1 u 1 , u 1 v 2 , u 1 , v 2 u 1 , v 1 v 2 , v 1 , u 2 , v 2 , 1 ] f = 0
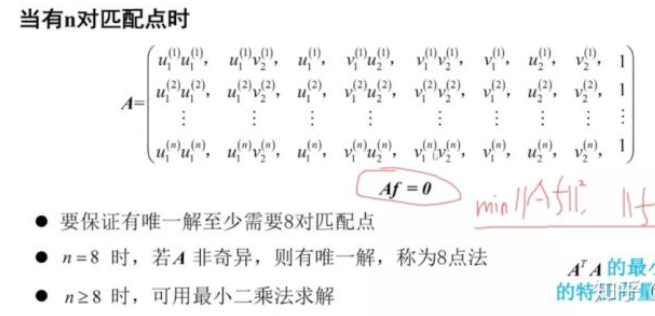
上式对于每一对匹配点都提供一个约束