
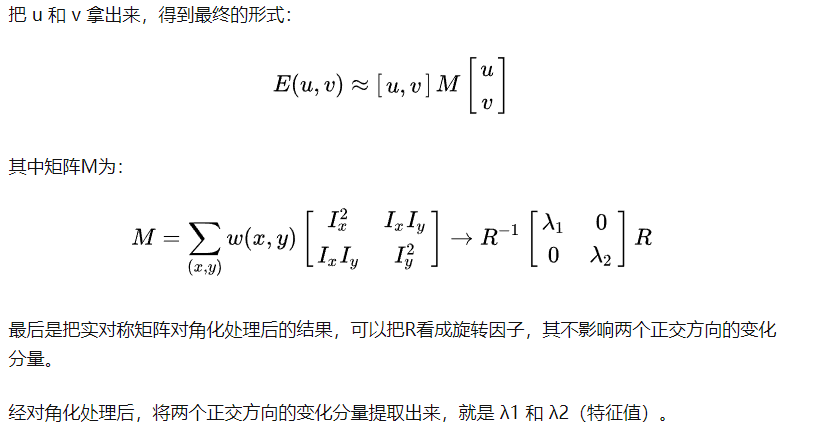
Harris角点
图像特征类型

- A和B处于平坦区域,没有什么确切的特征,它们所在的位置有很多种可能;
- C和D要相对简单一些,它们是建筑物的边缘,我们可以找到一个大致的位置,但是要定位到精确的位置仍然很难。所以边缘是更好的特征,但还不够好。
- E和F是建筑的一些角落,可以很容易地发现它们的位置,因为对于建筑物角落这个图像片段,我们不管朝哪个方向移动,这个片段看起来都会不一样。
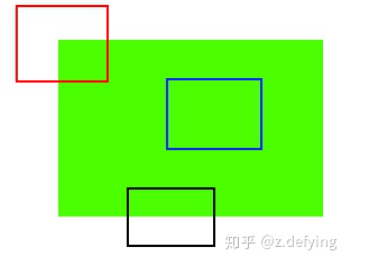
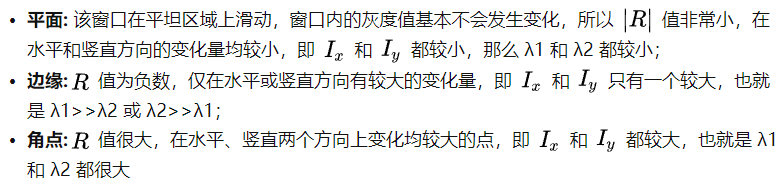
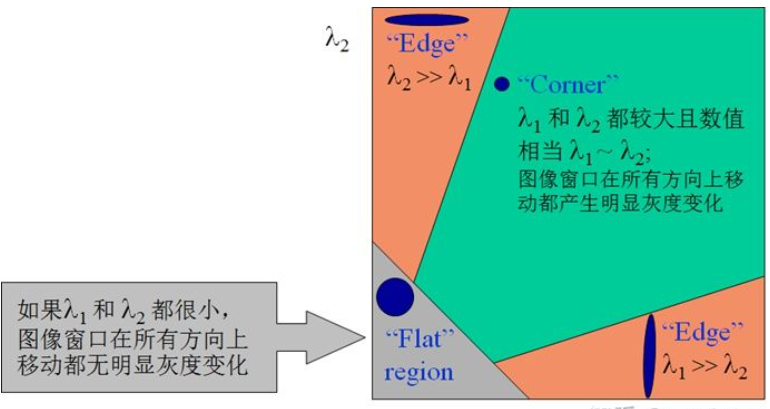
- 蓝色矩形表示一个平坦区域,在各方向移动,窗口内像素值没有变化;
- 黑色矩形表示一个边缘特征(Edges),如果沿着垂直方向移动(梯度方向),像素值会发生改变;如果沿着边缘移动(平行于边缘) ,像素值不会发生变化;
- 对于红色矩形框来说,它是一个角(Corners),不管你把它朝哪个方向移动,像素值都会发生很大变化。
图像特征提供了图像丰富的信息。角点特征是图像中较好的特征,比边缘特征更好地用于定位。
在图像的所有区域中,那些在所有方向上做微小移动,像素值变化都很大的区域,就是角点特征所在的区域。
Harris 角点检测器
角点是两条边缘的交点,它表示两条边方向改变的地方,所以角点在任意一个方向上做微小移动,都会引起该区域的梯度图的方向和幅值发生很大变化。
也就是一阶导数(即灰度图的梯度)中的局部最大所对应的像素点就是角点。
这样就可以将 Harris 角点检测算法分为以下三步:
-
当窗口(小的图像片段)同时向 x 和 y 两个方向移动时,计算窗口内部的像素值变化量;
-
-
对于每个窗口,都计算其对应的一个角点响应函数 R;
-
计算每个窗口对应的得分(角点响应函数R)
- k是一个经验常数, 在范围(0.04, 0.06)之间
-
-
然后对该函数进行阈值处理,如果 R > threshold,表示该窗口对应一个角点特征。
根据 R 的值,将这个窗口所在的区域划分为平面、边缘或角点。为了得到最优的角点,我们还可以使用非极大值抑制。
Harris角点检测的结果就是带有这些分数R的灰度图像,设定一个阈值,分数大于这个阈值的像素就对应角点。
Shi-Tomasi 角点检测器
由于 Harris 角点检测算法的稳定性和 k 值有关,而 k 是个经验值,不好设定最佳值。
Shi-Tomasi 发现,角点的稳定性其实和矩阵 M 的较小特征值有关,于是直接用较小的那个特征值作为分数。这样就不用调整k值了。
所以 Shi-Tomasi 将分数公式改为如下形式:
和Harris一样,如果该分数大于设定的阈值,我们就认为它是一个角点。

All articles in this blog are licensed under CC BY-NC-SA 4.0 unless stating additionally.
Related Articles
